|
Scanframe Modular Application 0.1.0
|
|
Scanframe Modular Application 0.1.0
|
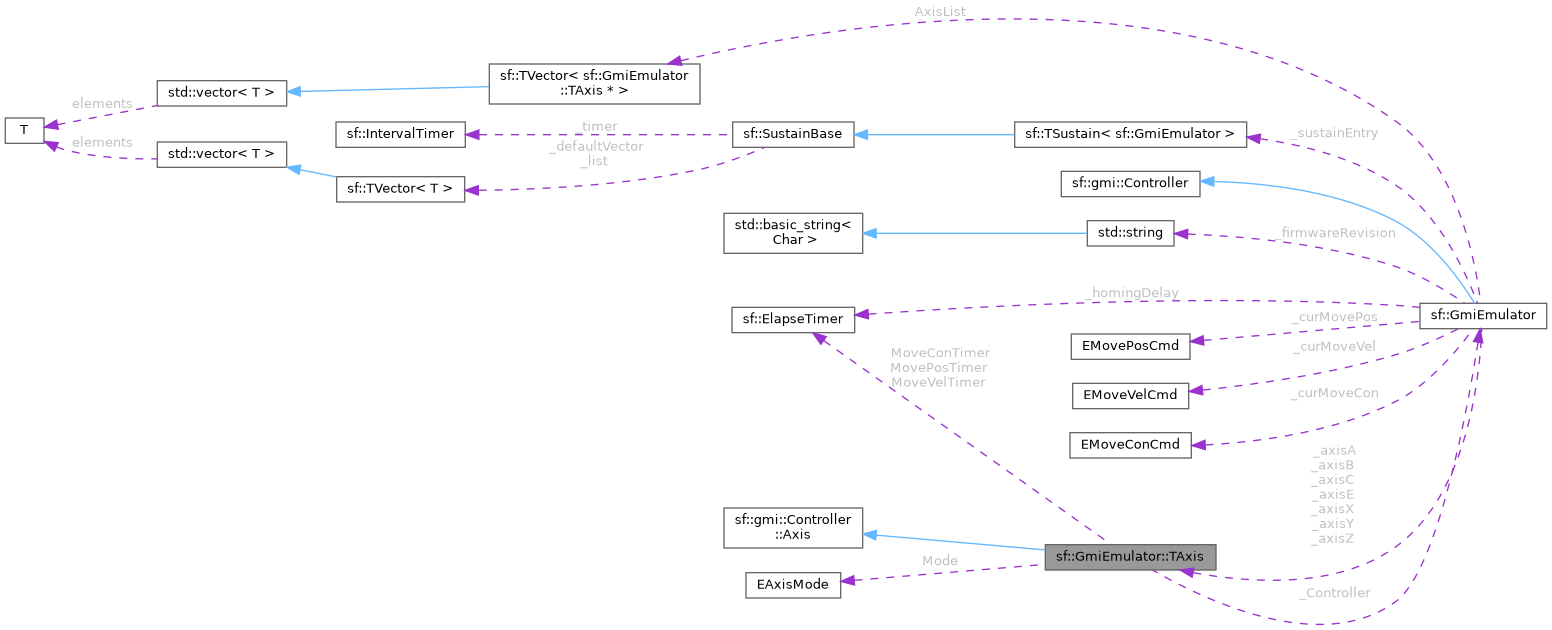
Axis type of this implementation. More...
#include <GmiEmulator.h>
Public Types | |
| typedef Axis | TInherited |
 Public Types inherited from sf::gmi::Controller::Axis Public Types inherited from sf::gmi::Controller::Axis | |
| typedef TVector< Axis * > | PtrVector |
| Easy to use vector for an array of Axis pointers. | |
Public Member Functions | |
| TAxis (GmiEmulator *me, EAxisLocation al) | |
| Constructor. | |
| ~TAxis () override | |
| Destructor. | |
| void | DoMovePos (EMovePosCmd mpc) |
| void | DoMoveVel (EMoveVelCmd mvc) |
| void | DoMoveCon (EMoveConCmd mcc) |
| bool | IsMovePosComplete (timespec clk) |
| bool | IsMoveVelComplete (timespec clk) |
| bool | IsMoveConComplete (timespec clk) |
| Public Member Functions inherited from sf::gmi::Controller::Axis | |
| EAxisLocation | getLocation () const |
| Returns the location of the axis in the constellation of axes. | |
| AxisMovements | getMovements () const |
| Returns the possible movements the is instance can make. | |
| const char * | getName () const |
| Returns the name of this instance. | |
| const char * | getDescription () const |
| Returns the description of this instance. | |
| value_type | getCurrent (EAxisValueType avt) const |
| Returns the current position/velocity/acceleration. | |
| bool | setCurrent (EAxisValueType avt, value_type val) |
| Sets the current position/velocity/acceleration. Only when not moving. | |
| value_type | getAccuracy () const |
| Returns the accuracy for velocity and position. | |
| value_type | getResolution () const |
| Returns the resolution of the axis. | |
| value_type | getMinMax (EAxisMinMax amm) const |
| Gets the current extremes from this axis. | |
| bool | setOffset (double ofs) |
| Set the position offset. | |
| value_type | setOffset () const |
| Get the position offset. | |
| double | getTarget (EAxisValueType avt) const |
| Returns the current velocity. | |
| bool | setTarget (EAxisValueType avt, value_type val) |
| Sets the current velocity. | |
| bool | setPosition (value_type value) |
| Sets the current position. | |
| value_type | normalized (value_type pos) const |
| normalize the passed position for all unlimited rotation axes. Uses accuracy to find the actual position to normalize. The passed value is also returned. | |
| bool | setMode (EAxisMode mode) |
| Sets the axis mode for operation. Returns false on failure. | |
| EAxisMode | getMode () const |
| Returns the mode of operation. | |
| bool | canModeChange (EAxisMode cur_mode, EAxisMode new_mode, bool pos_complete, bool vel_complete, bool con_complete) |
| Returns true if the mode can be changed. | |
Additional Inherited Members | |
| Protected Member Functions inherited from sf::gmi::Controller::Axis | |
| Axis (Controller *mc, EAxisLocation) | |
| Constructor that registers itself at the passed controller. | |
| virtual | ~Axis () |
| Virtual destructor for possible derived destructors. | |
| Protected Attributes inherited from sf::gmi::Controller::Axis | |
| AxisMovements | _movements |
| Holds the possible movements. | |
Axis type of this implementation.
| sf::GmiEmulator::TAxis::TAxis | ( | GmiEmulator * | me, |
| EAxisLocation | al | ||
| ) |
Constructor.
| me | |
| al |
|
override |
Destructor.
| void sf::GmiEmulator::TAxis::DoMoveCon | ( | EMoveConCmd | mcc | ) |
| void sf::GmiEmulator::TAxis::DoMovePos | ( | EMovePosCmd | mpc | ) |
| void sf::GmiEmulator::TAxis::DoMoveVel | ( | EMoveVelCmd | mvc | ) |
| bool sf::GmiEmulator::TAxis::IsMoveConComplete | ( | timespec | clk | ) |
| bool sf::GmiEmulator::TAxis::IsMovePosComplete | ( | timespec | clk | ) |
| bool sf::GmiEmulator::TAxis::IsMoveVelComplete | ( | timespec | clk | ) |
| GmiEmulator* sf::GmiEmulator::TAxis::_Controller |
| value_type sf::GmiEmulator::TAxis::Accuracy |
| value_type sf::GmiEmulator::TAxis::CurPos |
| value_type sf::GmiEmulator::TAxis::CurVel |
| friend sf::GmiEmulator::TAxis::GmiEmulator |
| value_type sf::GmiEmulator::TAxis::MaxAcc |
| value_type sf::GmiEmulator::TAxis::MaxPos |
| value_type sf::GmiEmulator::TAxis::MaxVel |
| value_type sf::GmiEmulator::TAxis::MinPos |
| EAxisMode sf::GmiEmulator::TAxis::Mode |
| sf::ElapseTimer sf::GmiEmulator::TAxis::MoveConTimer |
| sf::ElapseTimer sf::GmiEmulator::TAxis::MovePosTimer |
| sf::ElapseTimer sf::GmiEmulator::TAxis::MoveVelTimer |
| value_type sf::GmiEmulator::TAxis::OfsPos |
| value_type sf::GmiEmulator::TAxis::Resolution |
| value_type sf::GmiEmulator::TAxis::Round |
| value_type sf::GmiEmulator::TAxis::StartVel |
| value_type sf::GmiEmulator::TAxis::TrgAcc |
| value_type sf::GmiEmulator::TAxis::TrgDist |
| value_type sf::GmiEmulator::TAxis::TrgDist2 |
| value_type sf::GmiEmulator::TAxis::TrgPos |
| value_type sf::GmiEmulator::TAxis::TrgVel |