|
| | GmiEmulator (const Parameters &) |
| |
| | ~GmiEmulator () override |
| |
| bool | doInitialize (bool) override |
| | Initialization function which must be overridden by a derived class. Should check the hardware configuration.
|
| |
| bool | doHomeAxes (bool skip) override |
| | Does the real execution of the home function and must be overridden. When skip has been passed the implementation tries to skip homing.
|
| |
| void | addPropertyPages (PropertySheetDialog *sheet) override |
| | Adds controller specific property pages to the passed sheet.
|
| |
| bool | enumParamIds (IdList &ids) const override |
| |
| gmi::IdType | getParamId (EParam param, int axis=std::numeric_limits< int >::max()) const override |
| |
| bool | handleParam (gmi::IdType id, ParamInfo *info, const Value *setval, Value *getval) override |
| | This function must be overridden to handle the interface parameters. When info in non-null the parameter info must be filled in. When the set or get value is non-null the value is set and/or retrieved.
|
| |
| gmi::IdType | getResultId (EResult result, int axis=std::numeric_limits< int >::max()) const override |
| |
| bool | enumResultIds (IdList &ids) const override |
| |
| bool | handleResult (gmi::IdType id, gmi::ResultInfo *info, gmi::BufferInfo *buf_info) override |
| | This function must be overridden to handle the interface results.
|
| |
| void | doMovePos (EMovePosCmd mpc) |
| |
| void | doMoveVel (EMoveVelCmd mvc) |
| |
| void | doMoveCon (EMoveConCmd mcc) |
| |
| bool | sustain (const timespec &ts) |
| |
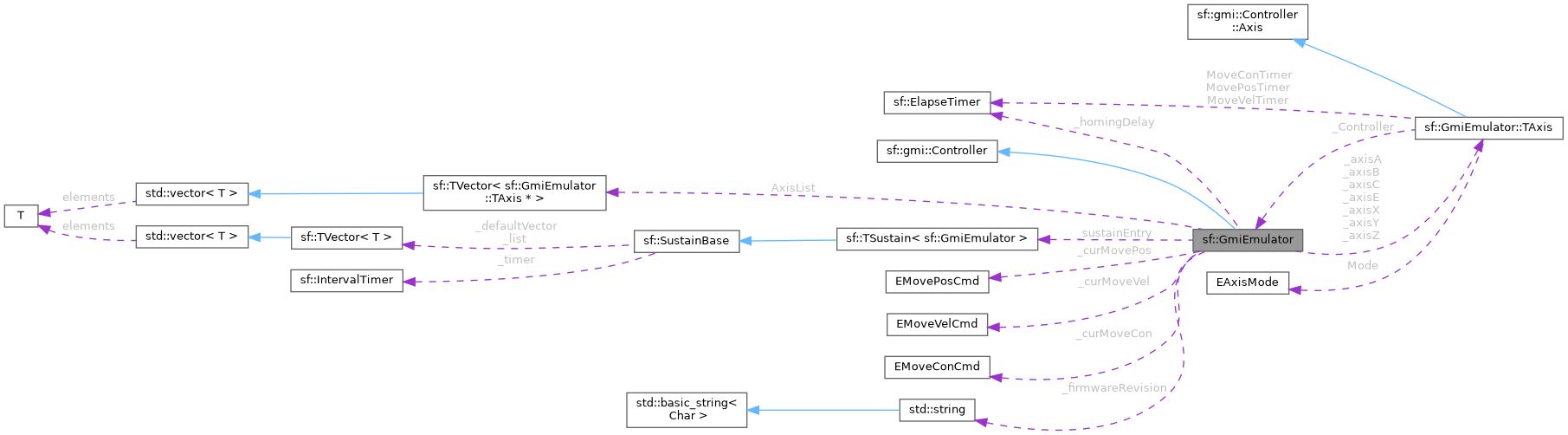
| | Controller (const Parameters &) |
| | Constructor for passing general structure for derived classes.
|
| |
| virtual | ~Controller () |
| | Virtual destructor for derived classes.
|
| |
| void | destroy () |
| | Must be called from a derived class in the destructor before anything.
|
| |
| bool | initialize () |
| | Initializes the hardware for operation and starts the thread when doInitialize returns true.
|
| |
| bool | uninitialize () |
| | Un-initializes the hardware.
|
| |
| const ControllerListener::emitter_type & | getEventEmitter () const |
| | Attaches the event handler for events.
|
| |
| bool | storeSettings (bool rd) |
| | Reads or writes the non exported parameters/settings to profile.
|
| |
| bool | homeAxes (bool skip) |
| | Start homing procedure and returns true when successfully started. When skip has been passed the implementation tries to skip homing.
|
| |
| bool | setJoystick (EJoystickCmd jsc) |
| | Enables or disables the joystick mode of the controller.
|
| |
| EJoystickCmd | getJoystick () const |
| | Returns the joystick state. Off=0, Stop=1 and On=2.
|
| |
| EAxisLocation | getJoystickAxis () const |
| | Returns the current selected axis on the joystick control. This does not mean it is enabled.
|
| |
| bool | setJoystickAxis (EAxisLocation axis_loc) |
| | Sets the selected axis for the joystick enabled or not.
|
| |
| EAxisLocation | getPopAxis () const |
| | Returns the current selected axis on the pop event source.
|
| |
| bool | setPopAxis (EAxisLocation al) |
| | Sets the selected axis for the pop event source.
|
| |
| bool | setTriggerEnable (bool enable) |
| | Sets the trigger enable.
|
| |
| bool | getTriggerEnable () const |
| | Gets the trigger enable status.
|
| |
| value_type | setTriggerFreq (value_type freq) |
| | Sets the trigger internal frequency generator and returns the clipped or rounded value.
|
| |
| value_type | getTriggerFreq () const |
| | Returns the trigger internal frequency generator.
|
| |
| bool | setMovePos (EMovePosCmd mpc) |
| | Executes a passed move position command.
|
| |
| EMovePosCmd | getMovePos () const |
| | Returns the current active position command. When moving position the command returned will eventually become mcSTOP.
|
| |
| bool | setMoveVel (EMoveVelCmd mvc) |
| | Executes a passed move velocity command.
|
| |
| EMoveVelCmd | getMoveVel () const |
| | Returns the current active velocity command.
|
| |
| bool | setMoveCon (EMoveConCmd mcc) |
| | Executes a passed move continuous command.
|
| |
| EMoveConCmd | getMoveCon () const |
| | Returns the current active velocity command.
|
| |
| Axis & | getAxis (int axis_loc) |
| | Gets a reference to the axis at the specified location.
|
| |
| const Axis & | getAxis (int axis_loc) const |
| | Gets a const reference to the axis at the specified location.
|
| |
| Axis & | getPhysicalAxis (int axis_num) |
| | Returns the physical axis location of the passed axis number.
|
| |
| bool | getCurrent (EAxisValueType avt, AxesCoord &ac) const |
| | Gets the current axes values.
|
| |
| bool | setCurrent (EAxisValueType avt, const AxesCoord &coord) |
| | Sets the current axes values.
|
| |
| bool | getTarget (EAxisValueType avt, AxesCoord &coord) const |
| | Gets the target set for this axis.
|
| |
| bool | setTarget (EAxisValueType avt, const AxesCoord &coord) |
| | Set the target value type.
|
| |
| bool | setTarget (const AxesCoord &pos, const AxesCoord &vel, const AxesCoord &acc, bool linear) |
| | Set the target.
|
| |
| bool | setMode (EAxisMode am, const AxesCoord &ac, EAxisMode am_def=amDISABLED) |
| | Sets the mode according the in the coord specified axes.
|
| |
| bool | setTriggerAxis (EAxisLocation al) |
| | Sets the axis which pulses are used to derive the trigger pulses.
|
| |
| EAxisLocation | getTriggerAxis () const |
| | Gets the current selected trigger axis.
|
| |
| value_type | getTriggerDensity () const |
| | Gets the density of measurements in radians or meters depending on selected axis.
|
| |
| bool | setTriggerDensity (value_type td) |
| | Sets the density of measurements in rads or m depending on selected axis.
|
| |
| bool | setTriggerMode (bool intern) |
| | Sets Trigger mode.
|
| |
| bool | getTriggerMode () const |
| | Gets the trigger mode.
|
| |
| bool | setChuckJaw (EChuckJaw cj) |
| | Sets chuck-jaw state.
|
| |
| EChuckJaw | getChuckJaw () const |
| | Gets chuck-jaw state.
|
| |
| bool | isMovePosCompleted () const |
| | Returns true if the last position move is completed.
|
| |
| bool | isMoveVelCompleted () const |
| | Returns true if the velocity move is completed.
|
| |
| bool | isMoveConCompleted () const |
| | Returns true if the contineous move is completed.
|
| |
| bool | isMoving () const |
| | Function testing for movement of position and velocity mode. When there is an abort state of-any-of the motion groups the axis is considered as not moving.
|
| |
| bool | setPosition (EAxisLocation al, value_type value) |
| | Sets the current position of single axis.
|
| |
| bool | setPosition (const AxesCoord &ac) |
| | Sets the current position of all axis.
|
| |
| AxesCoord & | normalize (AxesCoord &pos) const |
| | normalize the passed position for all unlimited rotation axes. Uses accuracy to find the actual position to normalize. The passed value is also returned.
|
| |
| AxesCoord | normalized (const AxesCoord &dist) const |
| | normalize the passed position for all unlimited rotation axes. Uses accuracy to find the actual position to normalize. The passed value is also returned.
|
| |
| AxisLocations | getRadialUnlimited () const |
| | Gets a bitmap set of radial unlimited axis locations.
|
| |
| virtual void | openDebugger () |
| | Opens a debugger dialog for the motion controller if any.
|
| |
| bool | isReady () const |
| | Returns true if the current status is READY.
|
| |
| const char * | getStatusName () const |
| | Gets the current status as a name.
|
| |
| unsigned | getAxisCount () const |
| | Gets the amount real implemented axes.
|
| |
| std::string | getLastErrorText () const |
| | Gets the last error if there is one.
|
| |
| bool | getParamInfo (IdType id, ParamInfo &info) const |
| | Retrieve information about the passed param id.
|
| |
| bool | getParam (IdType id, Value &value) const |
| | Returns the value of the specified parameter id. When the ID does not exist it returns false.
|
| |
| bool | setParam (IdType id, const Value &value, bool skip_event) |
| | Sets an interface parameter and notifies hooked user when skip_event is false.
|
| |
| bool | setGetParam (IdType id, Value &value, bool skip_event) |
| | Sets and immediately gets the same value again clipped or not. When skip event is true the callParamHook is not called.
|
| |
| virtual IdType | getParamId (EParam param, int axis=std::numeric_limits< int >::max()) const =0 |
| | Gets the ID of the parameter for the specified gate. Value std::numeric_limits<int>::max() tells the implementation to ignore the parameter.
|
| |
| virtual bool | enumParamIds (IdList &ids) const =0 |
| | Enumerate interface parameters ids.
|
| |
| void | setParamHook (NotifyProc proc, void *data) |
| | Sets a procedure hook for the interface implementation to be called when the value changes as a result of the implementation itself.
|
| |
| void | setResultHook (NotifyProc proc, void *data) |
| | Sets a procedure hook for the interface implementation to be called when there ias data result has data.
|
| |
| virtual IdType | getResultId (EResult result, int axis=std::numeric_limits< int >::max()) const =0 |
| | Gets the ID of the result for the specified gate. Value std::numeric_limits<int>::max() tells the implementation to ignore the result.
|
| |
| virtual bool | enumResultIds (IdList &ids) const =0 |
| | Enumerate interface results ids.
|
| |
| bool | getResultInfo (IdType id, ResultInfo &info) const |
| | Retrieve information about the passed result id.
|
| |
| bool | getResultBuffer (IdType id, BufferInfo &buf_info) |
| | Gets the result buffer associated with the result ID passed in the result hook at the time of the call.
|
| |
| bool | getAccuracy (AxesCoord &accuracy) const |
| | Gets the accuracy of positions of the implementation for a coords compare.
|
| |
| bool | getResolution (AxesCoord &resolution) const |
| | Gets the resolution on all axis for the implementation.
|
| |
| bool | getMinMax (EAxisMinMax amm, AxesCoord &coord) const |
| | Gets the current axes extremes.
|
| |
| bool | setOffset (const AxesCoord &coord) |
| | Sets the position offset for all position related parameters of all axes.
|
| |
| bool | getOffset (AxesCoord &coord) const |
| | Returns the current offset for all axes.
|
| |
| std::string | getProfilePath () const |
| | Returns the configuration profile path of this implementation.
|
| |
 Public Types inherited from sf::gmi::Controller
Public Types inherited from sf::gmi::Controller